Nilove
Mandal
Full-cycle product design from precision 3D CAD modeling to embedded C++ development for autonomous hardware.

"Bridging the gap between precision hardware design and intelligent software automation to build machines that think, move, and solve."
Operator Profile
I am a Mechanical Engineer who evolved into a full-stack roboticist. My work spans the entire hardware lifecycle: from designing stress-tested space frames in SolidWorks, to fabricating components via additive manufacturing, to writing the C++ control logic that brings the system to life.
Deployment Log
UrbanRoof Pvt Ltd
- (Deployment in progress) Translating architectural integration concepts into robust parametric models.
Innovative Systems & Robotics India
- Automated the batch conversion of 400+ SolidWorks drawing sheets to PDF using Task Scheduler, reducing manual documentation workload from several days to just 45 minutes.
- Designed and modelled a Cylinder Storage Rack with a custom crane assembly, generating comprehensive manufacturing drawings.
- Standardized internal part nomenclature for inventory tracking and updated Bills of Materials (BOMs) for Power Conveyor Systems.
Robo Solutions
- Direct an 8-member multidisciplinary engineering team focused on mechatronics development, robotics research, and software solutions.
- Manage end-to-end project lifecycles for 3+ major automation projects, overseeing hardware sourcing, firmware architecture, and mechanical design.
- Develop and conduct technical robotics workshops to educate peers on practical implementations of embedded systems and IoT architecture.
- Architected and deployed operational platforms: Main Portal, Workshop Hub, and 3D Print Service.
Academic Frame
- 1st Prize (Best Innovator) - HISET-2024 International Conference
- 2nd Prize (₹15,000) - IMPACT Conclave 3.0, IIT Ropar (Mar 2024)
- Best Project Title - ROBOTHON, SGBAU (Oct 2023)
Leadership
- Lead Instructor - AI, ML & IoT Workshop (Mauli College, Mar 2026)
- Workshop Facilitator - Gearing with Future Robotics (SSGMCE, Mar 2025)
- Instructor - 3D Modelling in AR/VR (Mozilla Club, Apr 2023)
- Event Head, RC Race - Innovo’24, SSGMCE (Feb 2024)
Technical Arsenal
Hardware & IoT

Software Control




CAD & Fab




Project Showcase
[ AERIAL & GROUND ROBOTICS ]
 AERIAL_UAV
AERIAL_UAV
Vajra 2.1 Drone
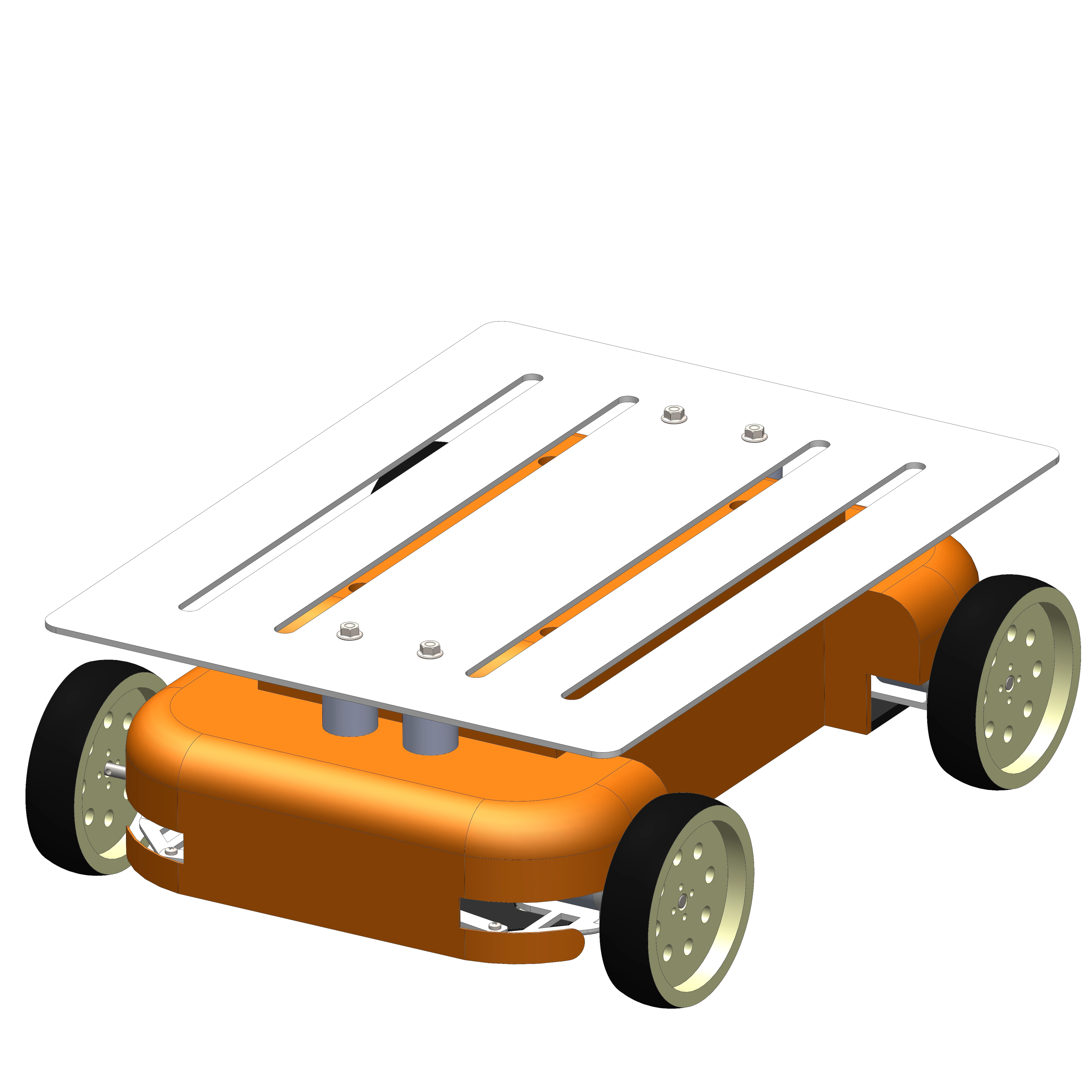
A teleoperated agricultural rover featuring a cost-reduced ₹9.4k DFM chassis and 400W MOSFET PWM spray control. Validated at 3 km/hr.
 AGV_SYSTEMS
AGV_SYSTEMS
Industrial Kuli
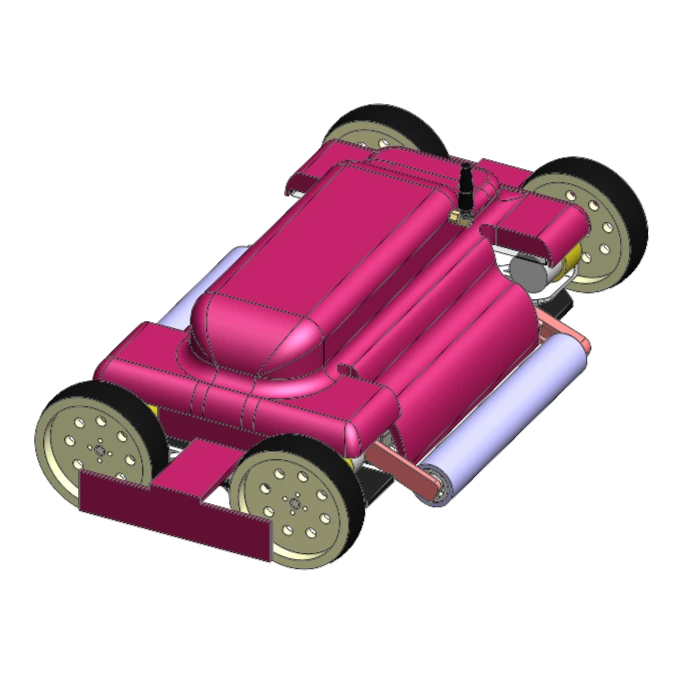
Synchronized Crab-Steering AGV utilizing a 300mm Trapezoidal Lead Screw to achieve mechanical synchronization with <2% error variance.
 SOLAR_ROBOT
SOLAR_ROBOT
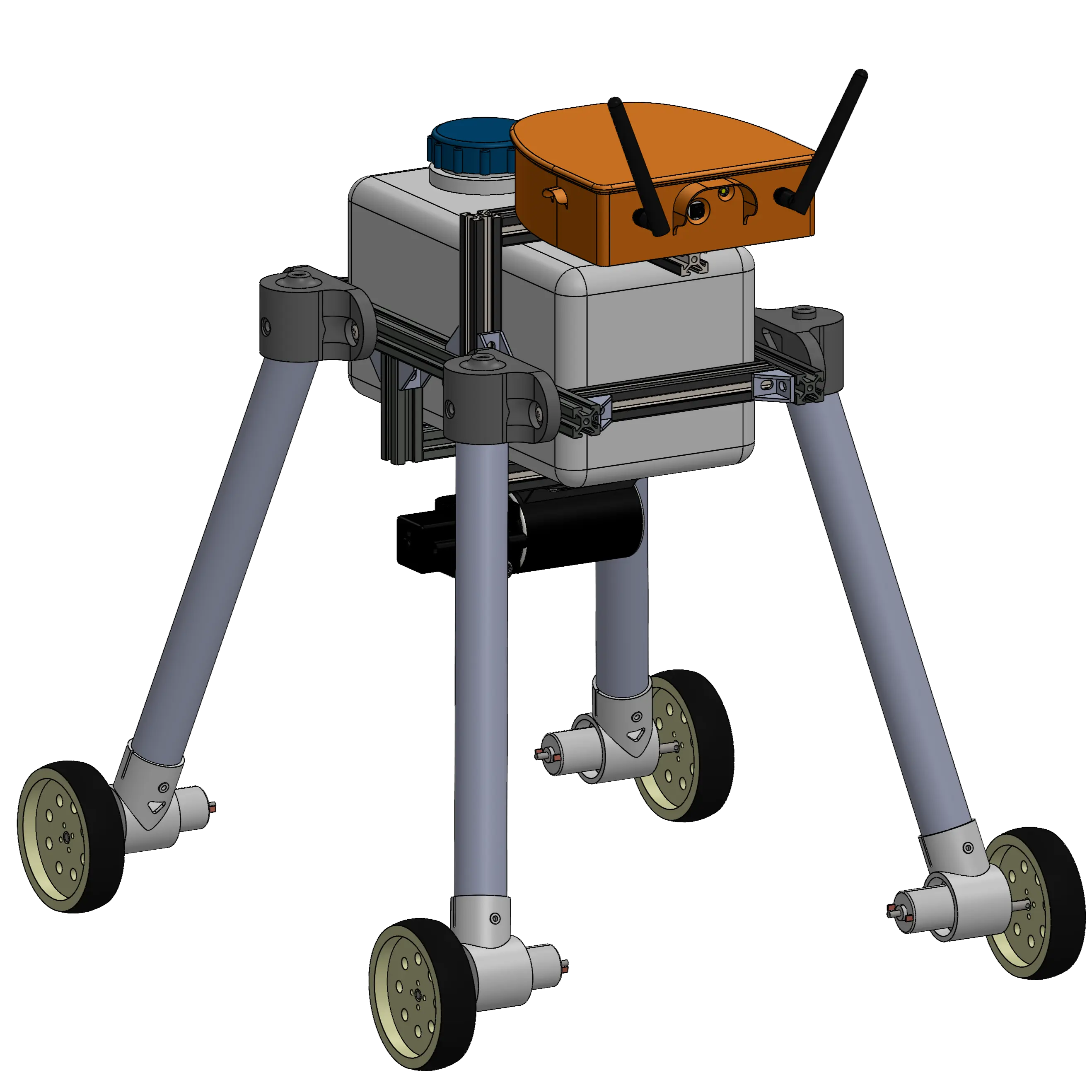
Trinetra V-Clean
Autonomous cleaning robot featuring a pivoting wheel drive train for zero-radius holonomic edge transitions and camera-based hotspot detection.
[ IOT & SMART AUTOMATION ]
 MEDICAL_IOT
MEDICAL_IOT
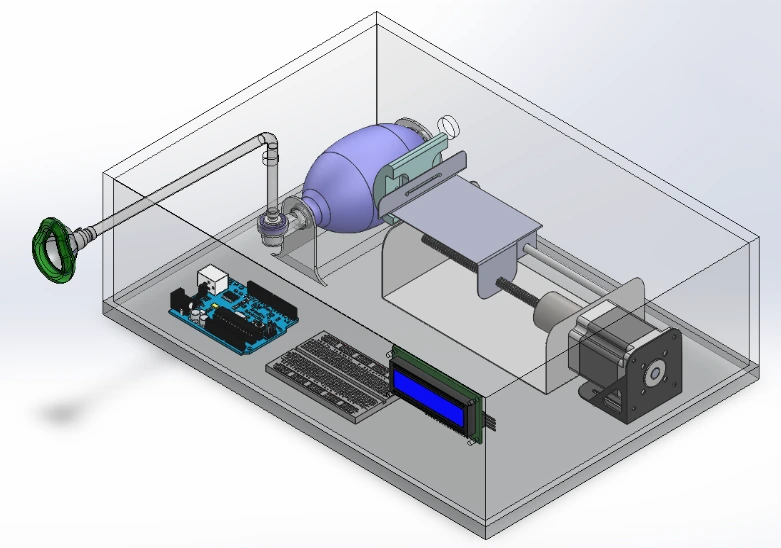
Smart Breathe
A ₹8,500 adaptive ventilator validating 4.28 Liters/min of air discharge. Features a SpO2 bio-feedback loop and Tele-ICU telemetry dashboard.
 DATA_LOGGING
DATA_LOGGING
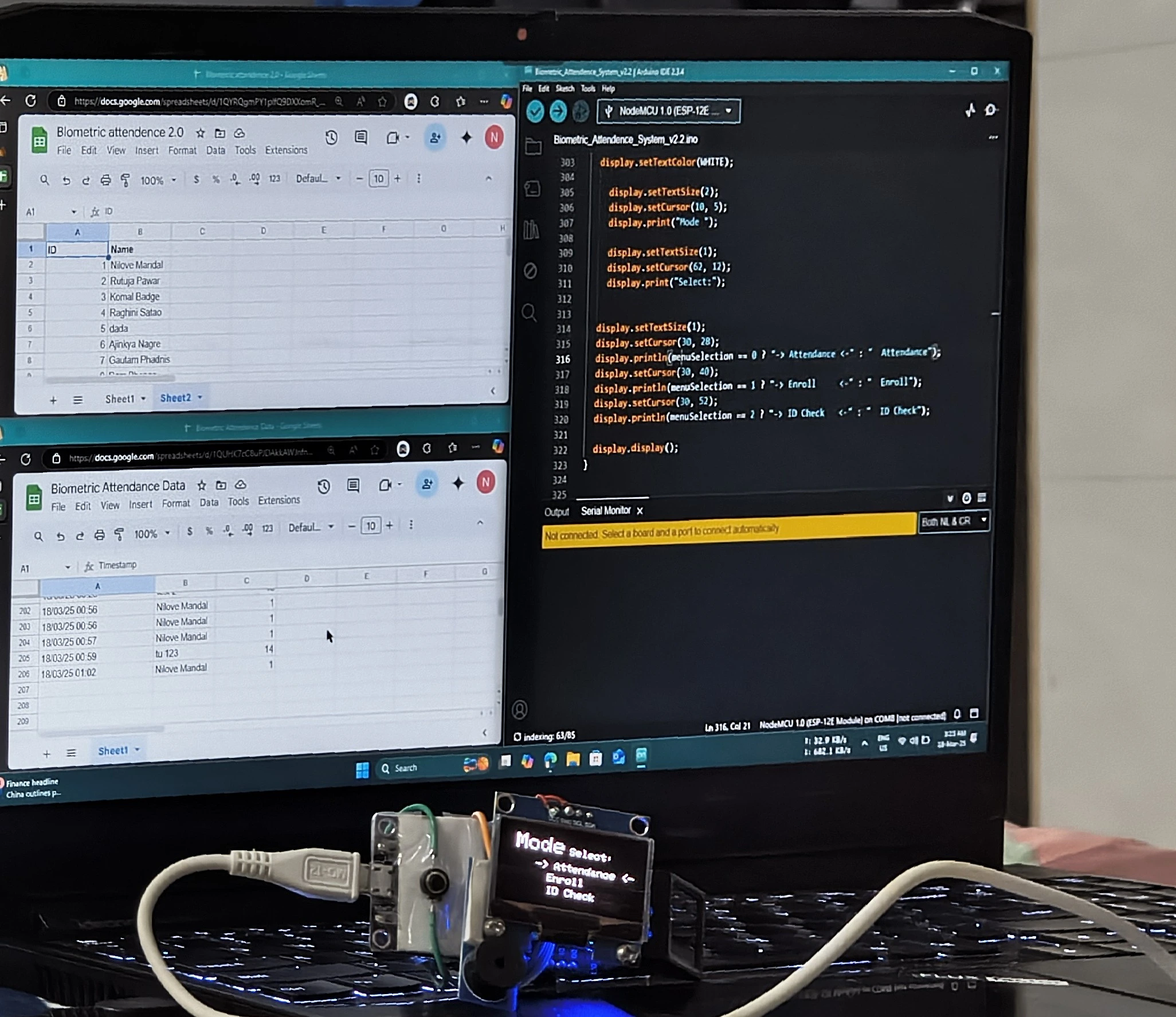
Biometric Sync
Hacked the Google Sheets API via Apps Script to allow an ESP8266 to append biometric data directly to the cloud. Logging reduced to <2 seconds.
 AGRI_TECH
AGRI_TECH
IoT Seeding Unit
Automated Gatekeeper rig enforcing a Batch-Check algorithm that re-verifies soil moisture every 10 seeds, preventing dead germination.
 POWER_ELECTRONICS
POWER_ELECTRONICS
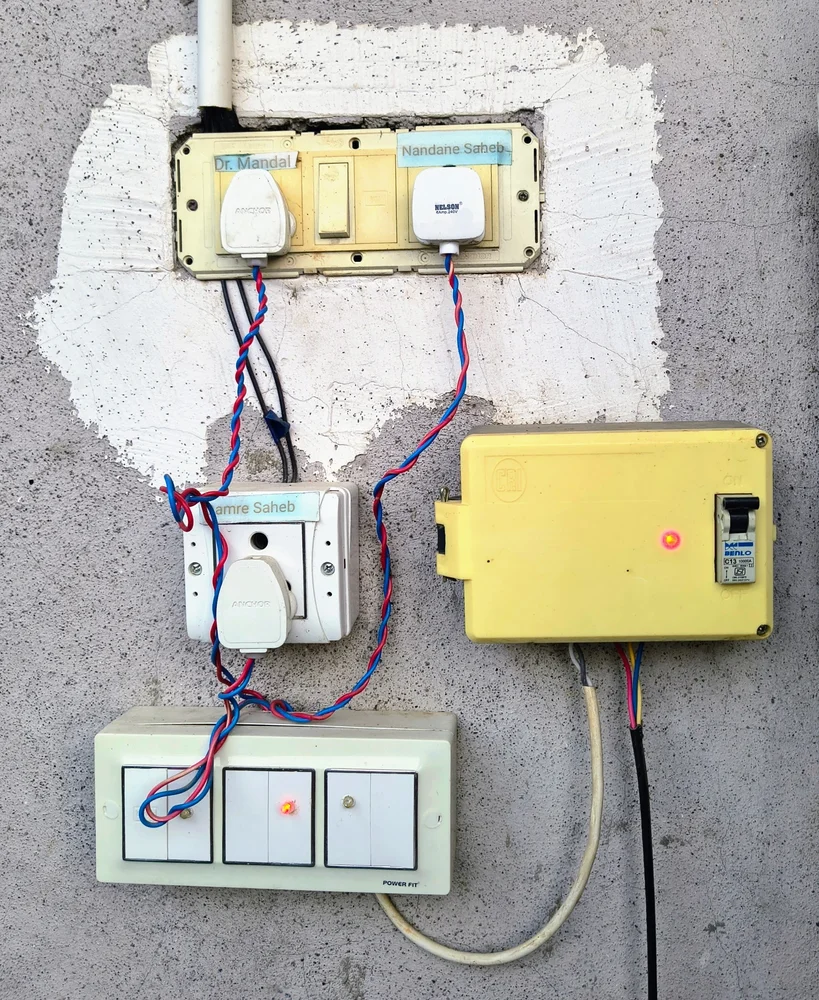
Smart AC Arbiter
Solid-state arbitration system fully deployed in a live multi-house setup to manage inductive loads based on supply availability and priority logic.
 SENSOR_SYSTEM
SENSOR_SYSTEM
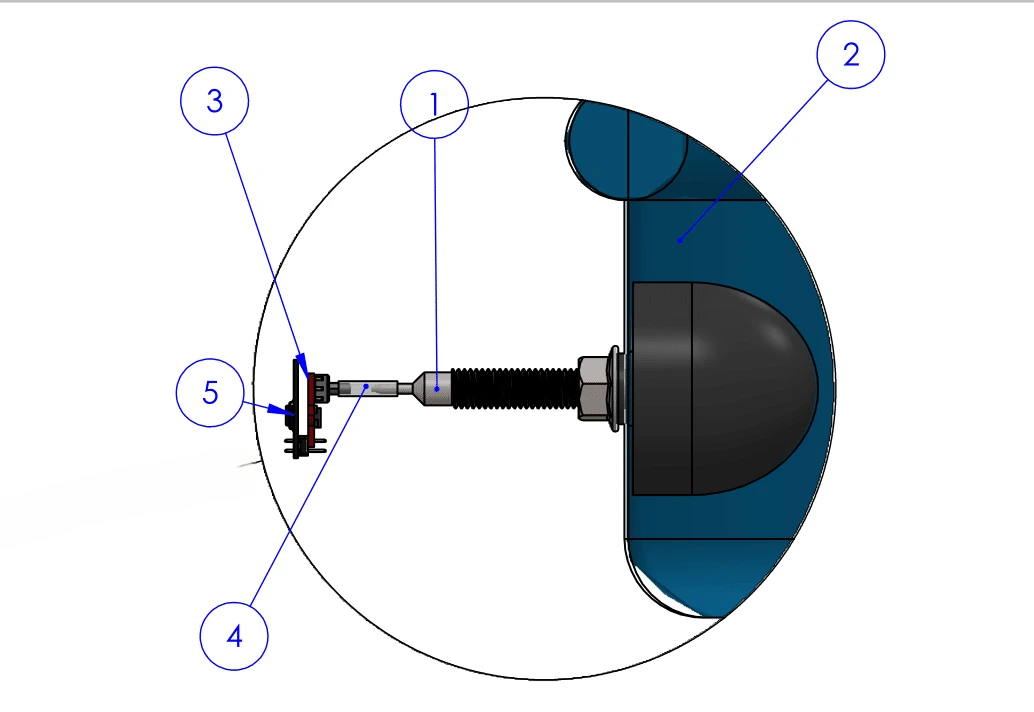
HydroGauge Sensor
Pneumatic isolation system for corrosive tanks featuring a temperature-compensation algorithm that linearizes bladder elasticity offset.
[ AI & PRODUCT DESIGN ]
 AI_COMPANION
AI_COMPANION
Hootie Desktop Bot
Biomimetic IoT companion featuring a capacitive-touch Joy Protocol, C++ state machine, OpenWeather API, and a chassis perfected over 12 versions.
 VEHICLE_DESIGN
VEHICLE_DESIGN
SAE ATV Roll Cage
Optimized AISI 4130 space frame. Achieved an SF of 2.97 against a 13,500N load while maintaining a 30kg chassis and >3.5 kNm/degree stiffness.
 ERGONOMICS
ERGONOMICS
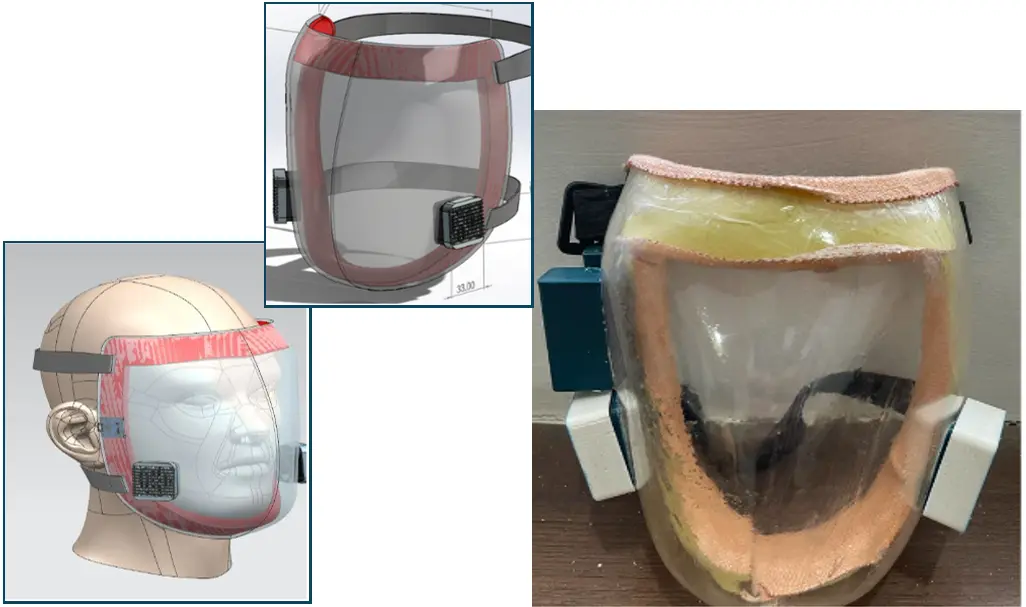
Anti-Fog PPE
Conducted comparative research on shield geometry and coatings to maintain 95%+ visible light transmission while eliminating breath condensation.
 3D_MODELING
3D_MODELING
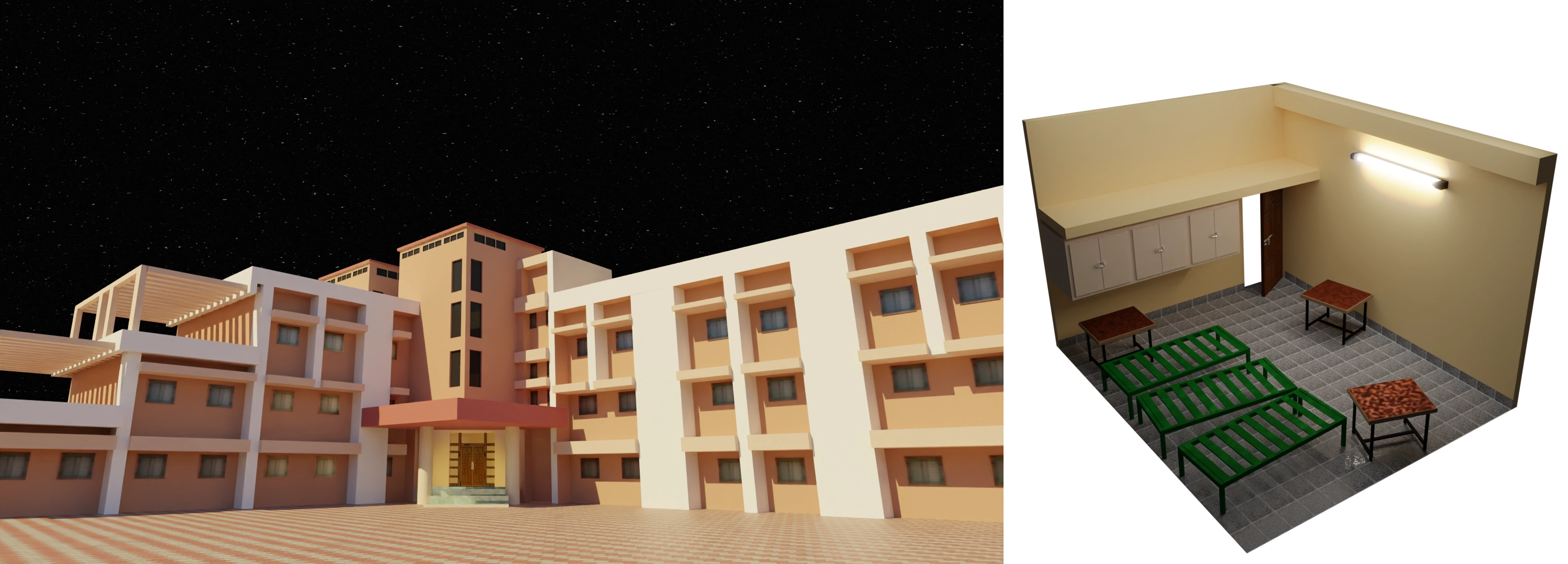
Campus 3D Model
Comprehensive 3D environment modelling of the college campus, accurately recreating structures and topology for virtual tours.
 VFX_TECH
VFX_TECH
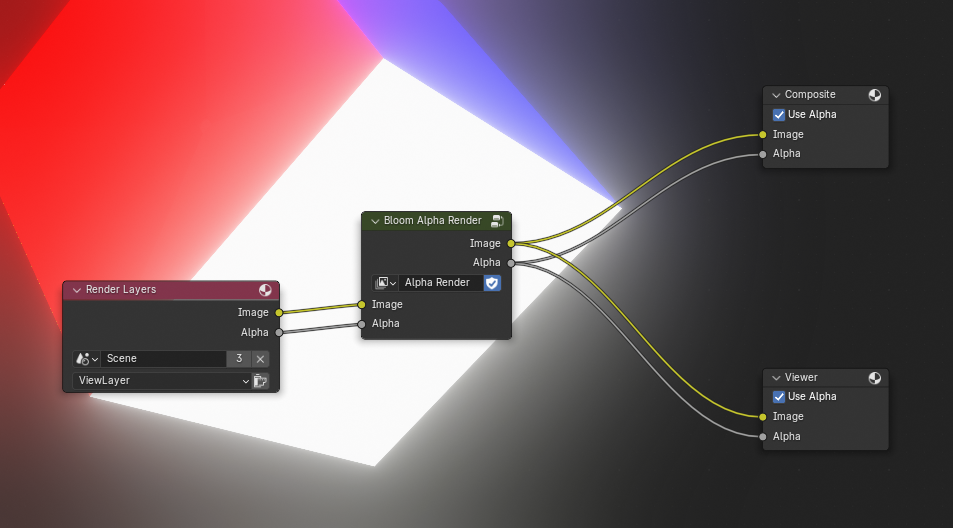
Blender Compositing
Devised a post-processing method for achieving Bloom effects with transparency in the Eevee renderer for seamless AE/Premiere compositing.